Der Quantec ist ein Industrieroboter von KUKA. Wer schon mal eine Automobil Fabrik von innen gesehen hat, kennt diese Maschinen. Die Roboter schweißen voll automatisch Karosseriebleche zusammen.
Ich hab ein kleines Robotermodell vom KR Quantec aus Kunststoff im offiziellem KUKA Fanshop entdeckt und dachte mir, da kann man doch super Servomotoren rein bauen. Weil mir aber keine sinnvolle Aufgabe für den kleinen Roboter eingefallen ist, habe ich daraus wieder eine Leave-Me-Alone Box / Sinnlos Maschine gebaut.
Mechanik
Das fertige Modell sollte möglichst gut dem Original entsprechen. Also habe ich nach sehr kleinen Servos gesucht. Folgende habe ich bei eBay gefunden und verbaut:
3x Turnigy Digital Mini Servo 9g MG 2,2kg 4,8V
2x G02DP - AMAX Nano Digital Servo
Eigentlich hat so ein Industrieroboter 6 Achsen. Ich habe auf die letzte verzichtet, weil ich sie nicht benötige und ich kein Platz für den Servo gefunden habe.
Der erste Servo steckt unten im Grundgestell. Damit die Kabel innen verlaufen können, habe ich Langlöcher um den Drehpunkt gefräst. Alle Servos sind mit sehr viel 2K-Kleber befestigt. Gegenüber genauso die Drehscheiben / Ruderhörner. So kann man den Roboter später mit der Zentralschraube wieder bedingt demontieren.
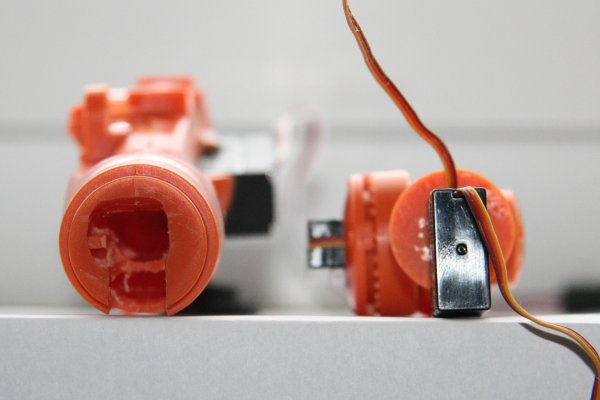
Die Servomotoren für Achse 2 & 3 befinden sich an gleicher Stelle wie die originalen Quantec Motoren.
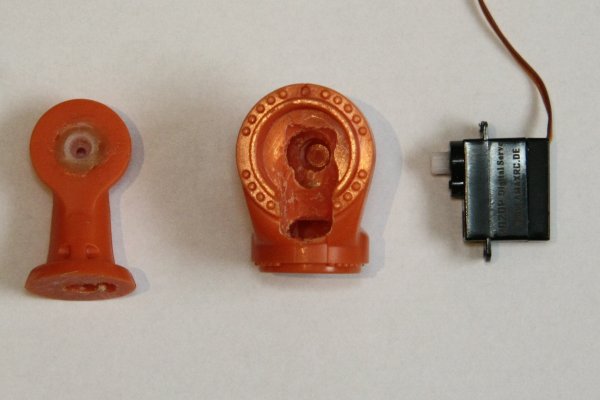
Ab Achse 4 ist alles etwas kleiner und schwieriger. Den Servomotor konnte ich ganz gut in der Struktur verstecken. Aber es ist alles geklebt.
An dem letzten Teil habe ich am längsten mit dem Dremel gearbeitet, bis endlich alles gepasst hat. Das Kabel läuft innen durch das ganze Schwenkgehäuse. Gegenüber vom Servo führt es dann durch ein Loch in der Drehachse ins nächste Teil.
Hardware
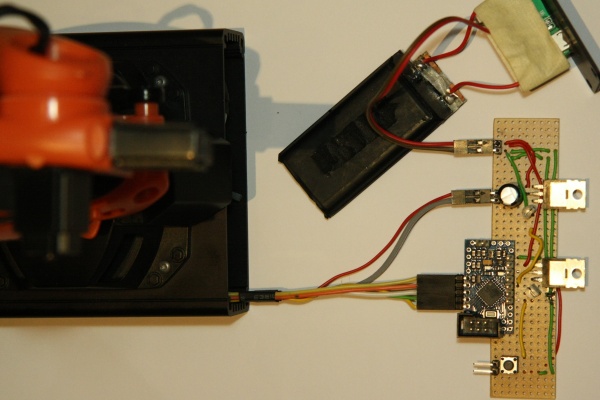
Natürlich werden die Servos mit einem AVR gesteuert. Aber da meine Ätzanlage momentan nicht zur Verfügung steht, habe ich auf ein Arduino-Pro-Mini (Clon) und eine Lachrasterplatine zurück gegriffen.
Zwei Verbesserungen zu meiner ersten LMA-Box gibt es. Zum einen verwende ich keine Batterien mehr, sondern eine 'Powerbank'. Diese dient eigentlich als Zusatzakku für Smartphones. Für meine Anwendung aber perfekt geeignet. Die Ausgangsspannung beträgt 5V und man kann den Akku einfach per micro-USB (wie ein Handy) aufladen.
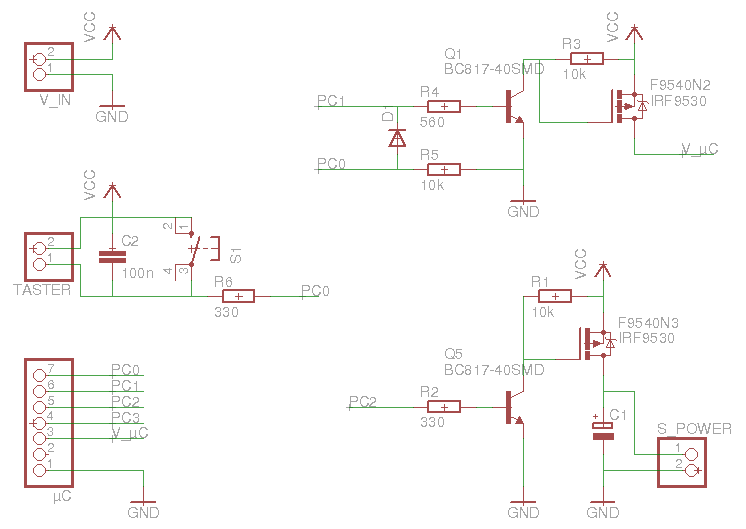
Dann wollte ich wieder unbedingt nur einen Schalter verwenden und die Möglichkeit haben, die Elektronik vom Akku zu trennen. Dieses mal habe ich es ohne Relais geschafft. Nach einigen Versuchen hat es mit folgender Schaltung funktioniert. Den MOSFET kann man wohl auch durch einen einfachen PNP Transistor ersetzen, so hoch sind die Ströme nicht.
Die ganze Hardware ist in einem schwarzen Profil Gehäuse aus Aluminium versteckt. Dieses dient zudem als Podest für den Quantec. Das Gehäuse war mit 28,- Euro übrigens das teuerste Teil im Projekt. Aber vergleichbare aus Plastik waren zu hoch und haben mir nicht gefallen.
Software
Das Programm läuft in einem Timer, wird ca. alle 16ms ausgeführt und besteht aus zwei Teilen. Zunächst generiere ich das PWM Signal für die Servos. Dazu schalte ich den entsprechenden Pin high, warte mit einem delay 1-2ms und schalte ihn wieder aus. Selbst wenn alle 5 Servos die maximale Pulsweite von 2ms benötigen, habe ich immer noch 6ms für den zweiten Programmteil - der Logik.
Damit der Roboter die gewünschten Bewegungen ausführt, habe ich ein paar Stellungen fest ein programmiert. Je nach Schalter Zustand, zählt ein counter hoch und löst nach der gewünschten Zeit die entsprechenden Stellungen aus. Zusätzlich habe ich versucht den Ablauf störungssicher zu machen. Es kommt immer jemand auf die Idee, den Schalter zwischendurch zu manipulieren.
So sieht der fertige Aufbau aus:
Video
letzte Änderung: 20.09.2015
Nachtrag
Mit den kleinen AMAX Servos bin ich sehr zufrieden. Aber die Turnigy Servos haben sich als Niete entpuppt. Ich habe extra robuste Servos mit Metall-Getriebe gewählt, weil die Belastung gerade an Achse 2 doch sehr hoch ist. Nach recht kurzer Zeit hat das Spiel in den Achsen stark zugenommen. Ich hab den Roboter nochmal zerlegt und musste feststellen, dass in den Servos keinerlei Lagerung verbaut ist. Was bringt ein Getriebe aus Metall, wenn die Zahnräder bei Belastung auseinander gedrückt werden? NIX! Da die Servos alle gut verklebt sind, wollte ich sie jetzt nicht mehr tauschen. Ich habe versucht die Achsen zusätzlich mit Beilagscheiben zu verstärken. Aber das wird nicht lange halten. Ziemlich ärgerlich. Darum meine Warnung: